The NERVE Center's capabilities for conducting research spread across multiple domains and applications. The NERVE center also provides testing services, facilities, and equipment for industry, academia and government via the Core Research Facility (CRF) system.

Exoskeletons and Wearable Robots
The NERVE Center’s Movement Assessment and Performance (MAP) Labs is used to evaluate the movement of humans, robots, and human-robot systems. Lab equipment includes a Motek M-Gait instrumented split-belt treadmill, Vasper aerobic exercise machine, motion capture systems, and force plates.
The NERVE Center works with the U.S. Army Combat Capabilities Development Command Soldier Center (DEVCOM-SC) to evaluate exoskeletons that assist warfighters by alleviating the burden posed by carrying heavy loads out in the field, enduring long marches, and performing labor-intensive sustainment tasks (DEVCOM W911QY-20-2-0005 and W911QY-18-2-0006).
Aiming to improve human-exoskeleton adaptation, NERVE collaborates with researchers at Purdue University and Yale University to dynamically sense physical fatigue using fabric-embedded sensors (NSF 1955979). Collaborating with the University of Michigan, NERVE evaluates novel exoskeleton controllers for co-adaption with the goal of providing as-needed assistance (NSF 2110214).
With support from the ASTM Exo Tech Center of Excellence, the NERVE Center develops test methods to evaluate the performance of exoskeletons and to establish performance criteria for exoskeletons towards ASTM F48 Committee on Exoskeletons and Exosuits standards.
Selected Publications:
- Pei-Chun Kao, Adam Norton, Yi-Ning Wu, John W. Ramsay, Karen N. Gregorczyk, and Holly A. Yanco. Characterizing Human Performance During Soldier-Relevant Tasks with a Knee-Actuated Exoskeleton. Journal of DoD Research and Engineering, Vol. 5, No. 4, pp.12-24, December 2022.
- Blake Bequette, Adam Norton, Eric Jones, and Leia Stirling. The Effect of a Powered Lower-Body Exoskeleton on Physical and Cognitive Warfighter Performance. In Proceedings of the Human Factors and Ergonomics Society Annual Meeting, Vol. 62, No. 1, pp. 1663-1667, September 2018.

Human Performance
The NERVE Center utilizes a suite of biometric sensors for physiological measurement of the physical and cognitive state of various human functions. These sensors can measure the impact of wearable technologies on a person, such as personnel protective equipment (PPE) or exoskeletons.
Sensors include those for measuring muscle activity (EMG), movement (IMU), oxygen consumption (VO2), heart rate, skin and core temperature, and cognitive load (fNIRS).
The NERVE Center works with the U.S. Army Combat Capabilities Development Command Soldier Center (DEVCOM-SC) to evaluate the physiological effects of wearing bomb suits -- those for protecting individuals during explosive ordnance disposal (EOD) operations -- on a person.
Selected Publications:
- Yi-Ning Wu, Adam Norton, Michael Zielinski, Andrew Stanwicks, and Patrick Pang. A Survey Study Identifying Challenging Explosive Ordnance Disposal (EOD) Operation Tasks By Public Safety Technicians. Medicine & Science in Sports & Exercise, Volume 55, No. 9S, pp. 623. September 2023.
- Yi-Ning Wu, Adam Norton, Michael R. Zielinski, Pei-Chun Kao, Andrew Stanwicks, Patrick Pang, Charles H. Cring, Brian Flynn, and Holly A. Yanco. Characterizing the Effects of Explosive Ordnance Disposal Operations on the Human Body While Wearing Heavy Personal Protective Equipment. Human Factors: The Journal of the Human Factors and Ergonomic Society, February 2021.

Walking Robots
The NERVE Center conducts research on legged robot systems, which include human-worn exoskeletons, humanoids, and quadrupedal robots. NERVE houses several bipedal legged robots including Agility Robotics Digit and Rainbow Robotics DRC-HUBO, as well as quadrupedal robots like Boston Dynamics Spot and Ghost Robotics V60. The MAP Labs facilities (see above) are also utilized for robotic walking experiments.
With funding from the Office of Naval Research (ONR) and in collaboration with Brown University, Naval Research Labs (NRL), and the Naval Undersea Warfare Center (NUWC), the NERVE Center develops and evaluates capabilities of walking robots operating autonomously in complex shipboard environments to improve locomotion and manipulation (ONR N00014-24-S-B001, N00014-23-1-2744, and N00014-21-1-2582).
Previously, the NERVE Center housed the NASA Valkyrie R5 humanoid robot in support of the Space Robotics Challenge (SRC) and human-robot interaction methods for humanoid robots used for disaster response tasks at the DARPA Robotics Challenge (DRC) were studied.
Selected Publications:
- Stephen Misenti, Brendan Hertel, Bowen Weng, Ryan Donald, Advait Jawaji, Magnus-Tryggvi Kosoko-Thoroddsen, J. Gregory Trafton, Adam Norton, Reza Azadeh, and Yan Gu. Experimental Evaluation of Commercial Quadruped Robots: Stability and Performance in Non-inertial Environments. International Journal of Intelligent Robotics and Applications, February 2025.
- Jordan Allspaw, Gregory LeMasurier, and Holly Yanco. Implementing Virtual Reality for Teleoperation of a Humanoid Robot (pdf). ACM/IEEE HRI 2020 Workshop on Virtual, Augmented, and Mixed Reality for Human-Robot Interactions (VAM-HRI), March 2020.

Human-Robot Teaming
The NERVE Center evaluates human-robot interaction (HRI) across many applications and contexts, including teleoperation of ground and aerial robots, autonomous systems with one or more human(s)-in-the-loop, and explainable interfaces for operators and bystanders in assistive robotics.
SUCCESS (Self-assessment and Understanding of Competence and Conditions to Ensure System Success) is a Multidisciplinary University Research Initiatives (MURI) project between Carnegie Mellon University, Brigham Young University, Tufts University, and the University of Massachusetts Lowell, whose focus is to develop new knowledge and techniques for system proficiency self-assessment (ONR N00014-18-1-2503).
The NERVE Center is one of several institutions part of AI-CARING (AI Institute for Collaborative Assistance and Responsive Interaction for Networked Groups), which is a National Artificial Intelligence (AI) Research Institute funded by the National Science Foundation (NSF) and led by the Georgia Institute of Technology. The institute supports older adults, their caregivers, and healthcare providers, focusing on Mild Cognitive Impairment (MCI) and other impairments (NSF 2112633).
Director Yanco also heads the UMass Lowell Human-Robot Interaction (HRI) Lab whose research focus includes multi-touch computing, interface design, robot autonomy, trust, and HRI evaluation methods.
Selected Publications:
- Gregory LeMasurier, Alvika Gautam, Zhao Han, Jacob W. Crandall, and Holly A. Yanco. Reactive or Proactive? How Robots Should Explain Failures. In Proceedings of the 2024 ACM/IEEE International Conference on Human-Robot Interaction (HRI ’24), Boulder, CO, March 2024.
- Christian Tagliamonte, Daniel Maccaline, Gregory LeMasurier, and Holly A. Yanco. A Generalizable Architecture for Explaining Robot Failures Using Behavior Trees and Large Language Models. Late Breaking Report, In Proceedings of the 2024 ACM/IEEE International Conference on Human-Robot Interaction (HRI ’24), Boulder, CO, March 2024.
- Daisy M. Kiyemba, Jasmin Marwad, Elizabeth J. Carter, and Adam Norton. Evaluation Tools for Human-AI Interactions Involving Older Adults with Mild Cognitive Impairments. Short Contribution, In Proceedings of the 2024 ACM/IEEE International Conference on Human-Robot Interaction (HRI ’24), Boulder, CO, March 2024.

Grasping and Manipulation
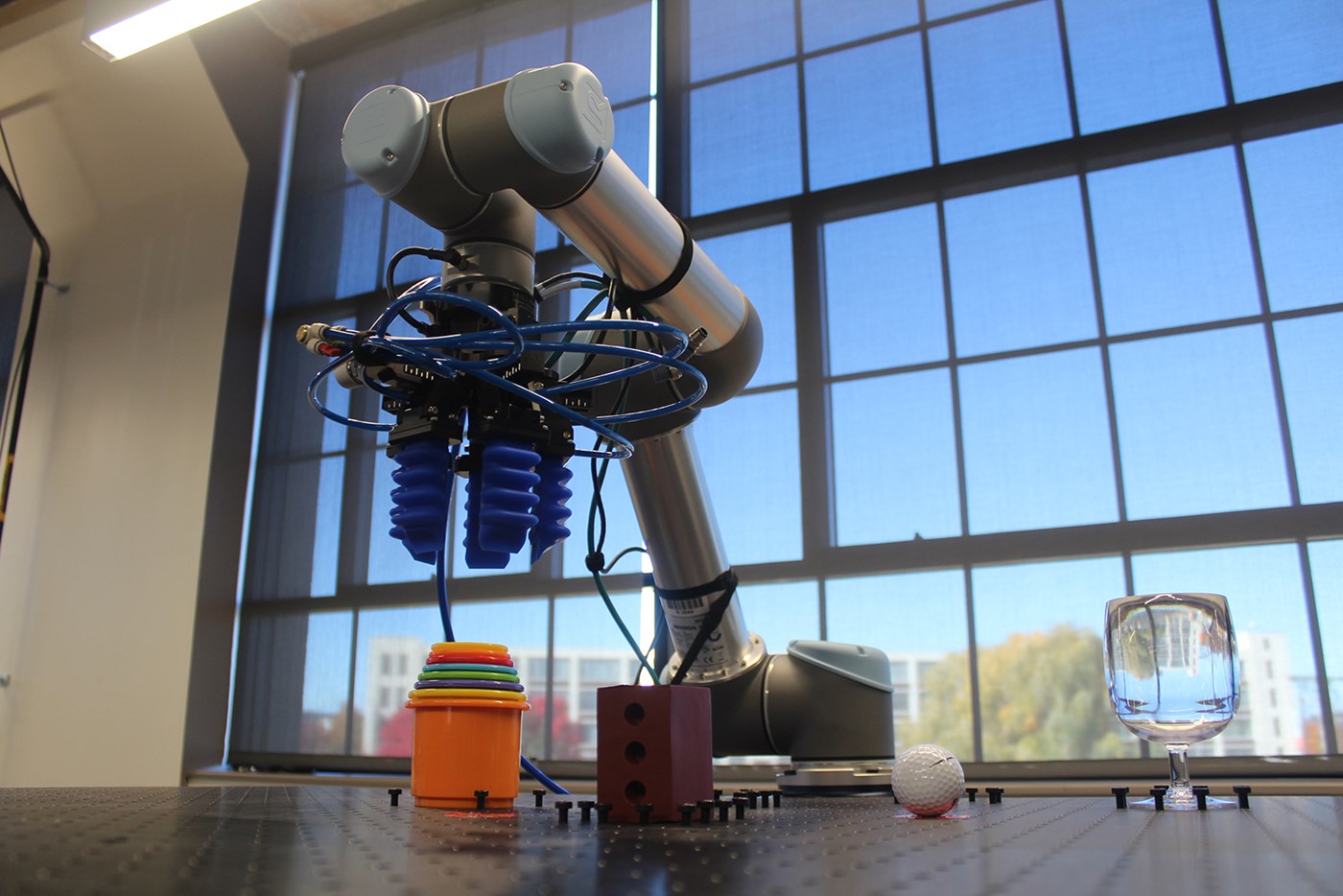
The NERVE Center houses a robotic manipulation testbed, named the ARMada, comprised of a variety of robotic arms, end effectors, and sensor systems. Equipment funding for the ARMAda was provided by the Massachusetts Manufacturing Innovation Initiative (M2I2) program through the MassTech Collaborative. The ARMada is used for developing test methods that evaluate grasping and manipulation capabilities, including that of end-effectors, grasp planners, assembly, and human-robot collaboration.
With funding from the National Institute of Standards and Technology (NIST), NERVE develops test methods to evaluate advanced robotic grasping and manipulation capabilities that rely on perception including robustness, adaptability, generalizability, and versatility (NIST 70NANB20H199 and 70NANB19H101). NERVE also develops datasets to support manufacturing research such as the NIST Manufacturing Objects and Assemblies Dataset (MOAD) (NIST 70NANB24H047 and 70NANB22H114).
In collaboration with Oregon State University (OSU), a remotely accessible testbed called REMOTE (Remote Experimentation of Manipulation for Online Test and Evaluation), is under development that includes repeatable and sensorized test stations for object grasping and door/drawer manipulation (NSF CNS-1925604).
An open-source ecosystem to support the development and benchmarking of robotic manipulation research is under development by a collaborative team across the University of Massachusetts Lowell, Rutgers University, Worcester Polytechnic University, Yale University, and University of South Florida. Check out robot-manipulation.org to learn more about the Collaborative Open-source Manipulation Performance Assessment for Robotics Enhancement (COMPARE) Ecosystem (NSF TI-2346069 and TI-2229577).
The NERVE Center develops metrics and evaluation methods for industrial robotics to support the Advanced Robotics for Manufacturing (ARM) Institute to measure performance, efficiency, productivity, and versatility of the ARM technology projects executed, leading the Metrics and Evaluation Working Group (MEWG) within the institute.
The NERVE Center provides YCB Object Sets, a standard set of objects used for benchmarking robotic manipulation, which consists of common objects of varying shapes, sizes, textures, weight, rigidity, and some widely used manipulation tests. NERVE also provides NIST Assembly Task Boards, which are designed to quantify a robot system’s grasping, manipulation, and perception capabilities when used in small parts assembly operations, including competencies such as peg insertion, gear meshing, electrical connector insertions, and nut threading. To apply to purchase either of these benchmarking tools, click the buttons below:
Apply Online For The YCB Object Set
Apply Online For NIST Assembly Task Board #1
Selected Publications:
- Adam Norton and Brian Flynn. Towards Using Multiple Iterated, Reproduced, and Replicated Experiments with Robots (MIRRER) for Evaluation and Benchmarking. IEEE ICRA 2024 Workshop on Ontologies and Standards for Robotics and Automation (WOSRA), Yokohama, Japan, May 2024.
- Joe Falco, Daniel Hemphill, Kenneth Kimble, Elena Messina, Adam Norton, Rafael Ropelato, and Holly Yanco. Benchmarking Protocols for Evaluating Grasp Strength, Grasp Cycle Time, Finger Strength, and Finger Repeatability of Robot End-effectors. IEEE Robotics and Automation Letters, Special Issue on Benchmarking Protocols for Robotic Manipulation, Volume 5, Issue 2, pp. 644-651, April 2020.

Unmanned Ground Vehicles
In collaboration with the National Institute of Standards and Technology (NIST), the NERVE Center develops test methods to evaluate the capabilities of ground response robots with wheels, tracks, or legs, including dexterity and mobility (NIST 70NANB22H080 and 70NANB20H021) in support of the ASTM E54.09 Committee on Homeland Security Applications; Subcommittee on Response Robots.
NERVE also develops test methods to evaluate industrial mobile robot capabilities including navigation and obstacle avoidance (NIST 70NANB20H199) in support of the ASTM F45 Committee on Robotics, Automation, and Autonomous Systems, of which Associate Director Norton is the committee chairman.
Selected Publications:
- Adam Norton, Brian Flynn, and Holly Yanco. Implementing Human-Robot Interaction Evaluation Using Standard Test Methods for Response Robots. Homeland Security and Public Safety: Research, Applications and Standards, ASTM STP1614, ASTM International, pp. 63-90, November 2019.
- Adam Norton, Peter Gavriel, and Holly Yanco. A Standard Test Method for Evaluating Navigation and Obstacle Avoidance Capabilities of AGVs and AMRs. ASTM Journal of Smart and Sustainable Manufacturing Systems, Volume 3, Issue 2, pp. 106-126, November 2019.

Autonomous Underwater Vehicles
The NERVE Center conducts research on underwater robot systems and houses vehicles including the BlueROV2 and Deep Trekker REVOLUTION ROV.
With funding from the Office of Naval Research (ONR) and in collaboration with Brown University, Naval Research Labs (NRL), and the Naval Undersea Warfare Center (NUWC), the NERVE Center develops and evaluates long-term underwater autonomy and human-robot interaction (HRI) towards reliability and endurance in dynamic and unstructured underwater environments (ONR N00014-24-S-B001 and N00014-23-1-2744).

Unmanned Aerial Systems
The NERVE Center develops test methods for evaluating the capabilities of small unmanned aerial systems (sUAS), including those related to navigation, obstacle avoidance, mapping, communications, and human-robot interaction.
NERVE works with the U.S. Army Combat Capabilities Development Command Soldier Center (DEVCOM-SC) to develop test methods and benchmark sUAS performance in subterranean and constrained indoor environments (i.e., GPS-denied) as well as dense urban outdoor environments in the DECISIVE (Development and Execution of Comprehensive and Integrated Systematic Intelligent Vehicle Evaluations) project (DEVCOM W911QY-20-2-0005 and W911QY-18-2-0006). For more information on DECISIVE, check out the DECISIVE project webpage.
The NERVE Center is also working to model and implement urban canyon wind profiles for benchmarking sUAS performance, using the wind generator located at the Kostas Research Institute (KRI) Expeditionary Cyber and Unmanned Aerial System (ECUAS) Lab at Northeastern University (DEVCOM W911QY-20-2-0005).
In collaboration with the National Institute of Standards and Technology (NIST), the NERVE Center develops test methods to evaluate the capabilities of aerial response robot capabilities including endurance, maneuvering, and mapping (NIST 70NANB24H073 and 70NANB22H079) in support of the ASTM E54.09 Committee on Homeland Security Applications; Subcommittee on Response Robots.
Previously, NERVE provided test & evaluation for the DARPA Fast Lightweight Autonomy program, which saw autonomous sUAS operating outdoors, indoors, and transitioning between both types of environments without GPS.
Selected Publications
- Edwin Meriaux, Jay Weitzen, Naye Yoni, and Adam Norton. Test Methodologies for Evaluating the Effectiveness of sUAS Communication Links for Operation in Indoor and Subterranean Environments. ASTM Journal of Testing and Evaluation, Volume 51, Issue 6, June 2023.
- Adam Norton, Reza Ahmadzadeh, Kshitij Jerath, Paul Robinette, Jay Weitzen, Thanuka Wickramarathne, Holly Yanco, Minseop Choi, Ryan Donald, Brendan Donoghue, Christian Dumas, Peter Gavriel, Alden Giedraitis, Brendan Hertel, Jack Houle, Nathan Letteri, Edwin Meriaux, Zahra Rezaei Khavas, Rakshith Singh, Gregg Willcox, and Naye Yoni. DECISIVE Benchmarking Data Report: sUAS Performance Results from Phase I. arXiv preprint arXiv:2301.07853, January 2023.
- Adam Norton, Peter Gavriel, Brendan Donoghue, and Holly Yanco. Test Methods to Evaluate Mapping Capabilities of Small Unmanned Aerial Systems in Constrained Indoor and Subterranean Environments. In Proceedings of the IEEE International Symposium on Technologies for Homeland Security (HST) 2021, November 2021.