Goal is To Create Standards to Help Roboticists Use and Compare Publicly Available Research
 Image by Brooke Coupal
Image by Brooke Coupal
07/01/2024
By Brooke Coupal
Imagine walking into an unfamiliar grocery store in search of bottled water. Upon spotting a cooler near a cash register, you open the cooler door and snag a cold bottle. While this may be a simple task for a person to accomplish, an assistive robot would greatly struggle with it.
“As people, we can go into an unknown, cluttered environment with things that we’ve never seen before and pick them up, but robots can’t do that,” says Holly Yanco, chair of the Miner School of Computer & Information Sciences in the Kennedy College of Sciences. “The inability to reliably grasp and manipulate objects in unstructured environments is a major limitation preventing fully assistive robot systems in the home for our growing elderly population, flexible manufacturing to improve the supply chain, and many other applications.”
Yanco and a team of researchers want to improve robot manipulation by developing what they call a standardized “ecosystem” – a community-driven repository of guidelines, activities and working groups that will allow for open-source, or publicly available, research to be easily compared and implemented. Called the Collaborative Open-source Manipulation Performance Assessment for Robotics Enhancement (COMPARE), the project is being funded by a National Science Foundation (NSF) grant worth nearly $1.5 million.
“By establishing a new community-driven, open-source ecosystem for robot manipulation research and benchmarking, the field will move more rapidly toward solutions for robot perception and grasping,” says Yanco, who also directs the UMass Lowell New England Robotics Validation and Experimentation (NERVE) Center.
‘Full System Problem’
Researchers in the field of robot manipulation are met with a “full system problem,” says NERVE Assoc. Director Adam Norton. For a robot to complete a simple task, such as picking up a block, many parts must be considered, from the gripper used to grasp the object to the software that controls the robot. A researcher looking to develop one aspect of the manipulation process, such as an algorithm for the robot to analyze the environment before picking up the block, would also need to figure out a way to build all the other pieces of the robot before testing their development.
“It significantly holds back researchers who have to do all this work before actually implementing the part that is their contribution to the field,” Norton says. “It creates an enormous barrier to entry.”
 Image by Brooke Coupal
Image by Brooke Coupal
Publicly available research exists to help roboticists advance robot manipulation; however, the diversity of this work, from the technology researchers use to the methods they take, makes it difficult for others to incorporate it into their own research.
“Everybody working in this space is approaching it in very different ways,” Yanco says. “The goal of the COMPARE ecosystem is to create greater cohesion and compatibility between the research efforts.”
Community Engagement
Working with the robot manipulation community, Yanco and her team plan to develop research standards that will establish cohesion between the work of roboticists. By following the same standards, roboticists can compare research shared in the COMPARE system with their own work and easily implement the research of others into their efforts.
“This is really representative of one of NERVE’s core missions because we have testing and evaluation benchmark tools that we help distribute and maintain, and now we’re going to help lead an ecosystem that brings the community together around this area,” Norton says. “We’re the right team to do it.”
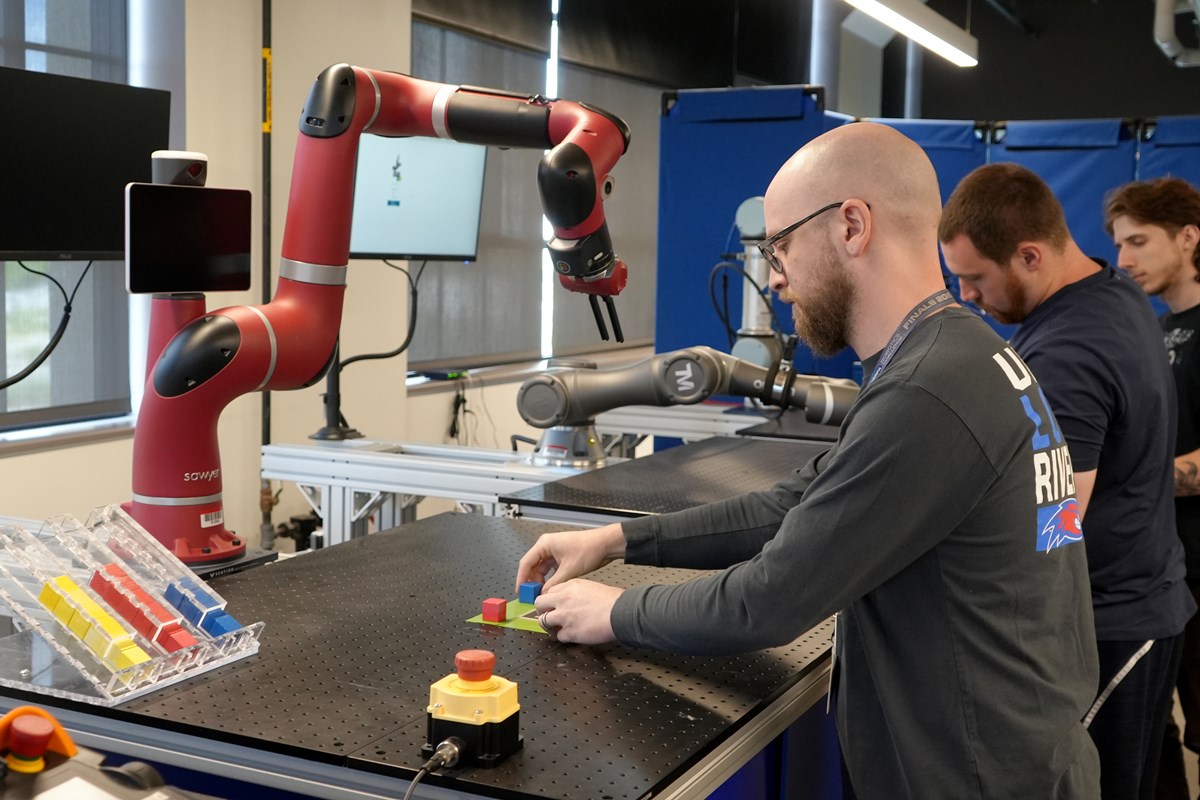 Image by Brooke Coupal
Image by Brooke Coupal
Funded by a previous NSF grant worth nearly $300,000, Yanco and Norton ran workshops with robot manipulation researchers to get their input on what they would want in a standardized system. They’ve since created an advisory board featuring people from industry, government organizations and academic research institutions for continued feedback. They are also working with robotics experts from Rutgers University, Yale University, University of South Florida and Worcester Polytechnic Institute, who all have different specialties that can contribute to the system.
As guidelines are developed, more workshops will be run at the NERVE Center and other robotic facilities, where researchers can put the standards into practice.
“By bringing people in, we’re hoping they will go off into industry or academia and use these standards as part of their research,” Yanco says. “This could have a big impact on robot manipulation.”